Full state feedback controller
This project was part of the course Computer Aided Control Systems Design given by professor Bart De Moor. I had to investigate the full state feedback controller design and the integral controller design as well as the LQG controller for a quadcopter.
I have investigated two types of controllers, the full state feedback controller and an integral controller. Both use a LQR controller. The advantages of such a LQR-controller is that is has an explicit linear solution which is calculated with a low on-line computational complexity. It does however also have some disadvantages. Constraints cannot be taken into account and only quadratic cost functions are possible. Another drawback is that it has no predictive capacity. A trajectory with different checkpoints was given, the goal was to make the quadcopter follow this trajectory as accurate as possible and look at the impact of changing the payload of the quadcopter.
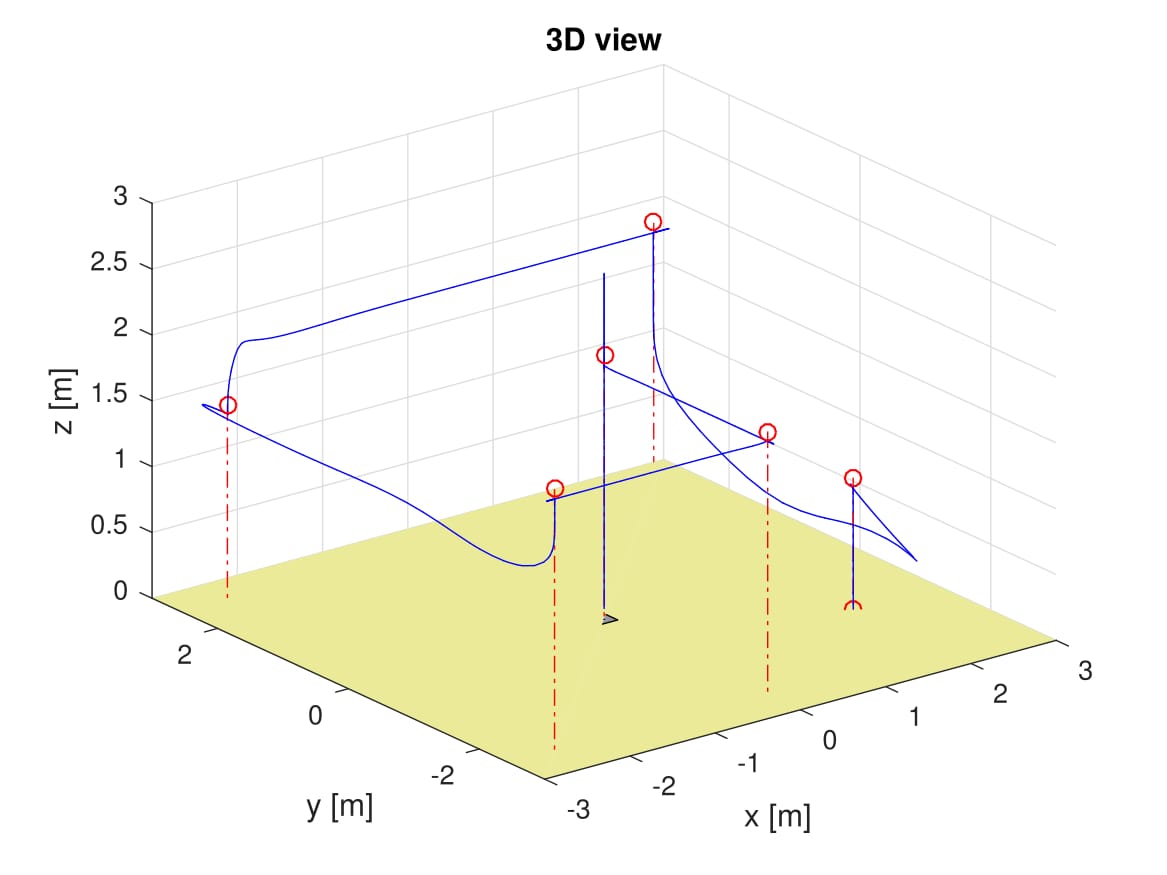
Full state feedback controller
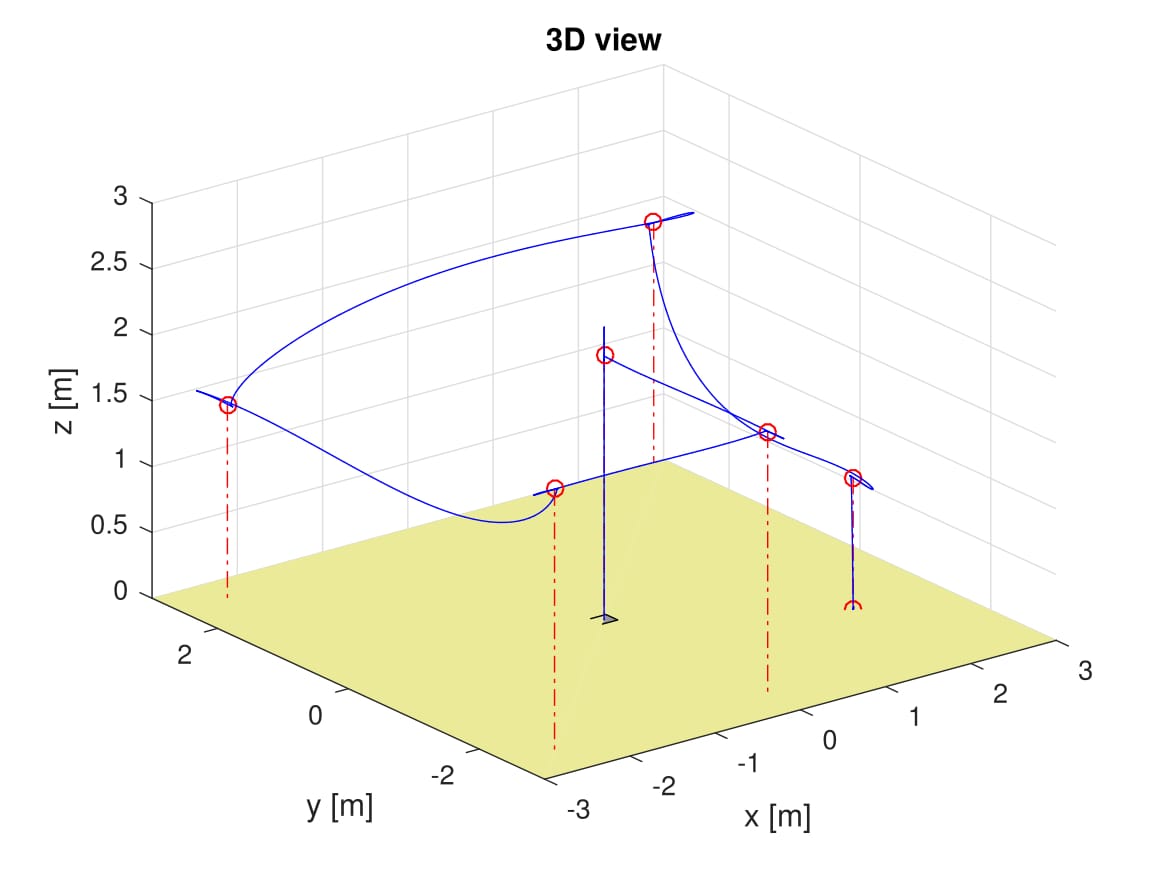
Integral controller
The same trajectory was also tested with a LQG controller. This is a Kalman filter that estimates the state-vector and is used together with the integral action.
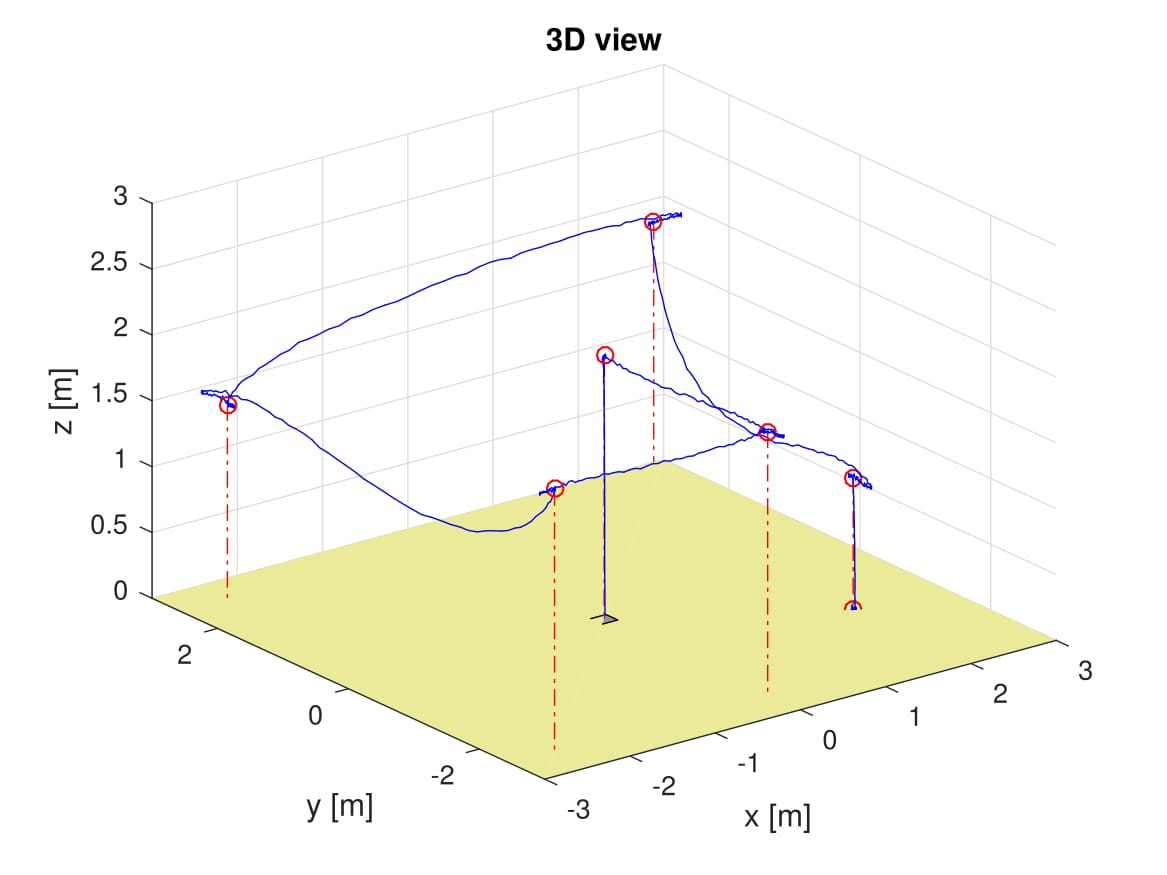
LQG controller
We conclude that the integral controller is a much better way to control the quadcopter.
It is able to cope quite decently with the added payload. Whereas the full-state feedback
controller produced poor results. The computational complexity of both controllers is about
the same so it is preferable to use the integral controller above the full-state feedback controller.
The LQG controller is slower than the 2 other variants but is least sensitive to noise.
If you would like to learn more about this project feel free to contact me
, and I will send you the full report.